
















Für meine Modellbahn habe ich mich für ein maritimes Anlagenthema entschieden. In meiner Wahrnehmung prägt nichts so sehr das Bild eines Hafens wie dessen Krane und Verladeanlagen.
Die geplanten Hafengebiete und Industrien sollen daher entsprechende Kranmodelle erhalten.
Der aktuelle Zustand des Modells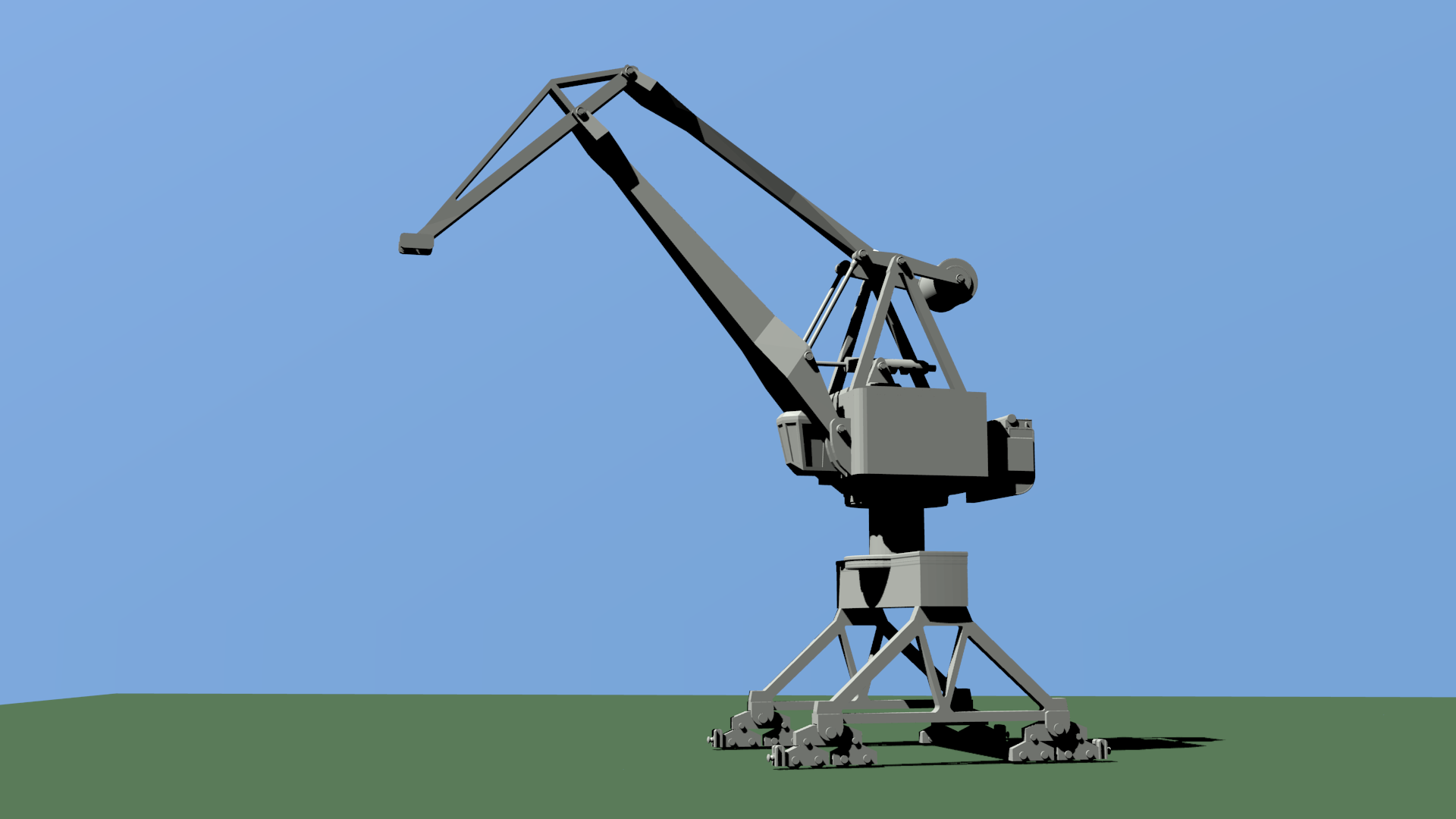
Es gibt vergleichsweise günstige Modellbausätze von verschiedenen Kranen in Spur N von NoBa-Modelle:
- Hafenkran 3102, Spur N (44,-€)
- Portalkran 3101, Spur N (46,-€)
Wenn man bedenkt wie komplex die Modelle wirken, erscheint der Preis angemessen.
Aber wenn man zusätzlich bedenkt, dass diese Modelle aus dem 3D-Drucker kommen, dann regt sich in mir der Wunsch meinen eigenen Kran zu erschaffen und zu drucken.
Ein Doppellenker-Wippdrehkran (Double Jib Level Luffing Crane) zeichnet sich dadurch aus, dass die Spitze des Auslegers beim Ausfahren die Höhe beibehält. Containerspreader, Greifer oder Kübel lassen sich so parallel zur Oberfläche nahezu horizontal verschieben um z.B. die Bunkeröffnung des Schiffs, das Containerchassis eines LKW oder Wagons oder den Trichter (Hopper) der Transportbänder im Bulk-Hafen leichter anzufahren. Dies ermöglicht dem Kranführer zudem auf halbautomatische Abläufe – wie zum Beispiel auf frei definierbare Endpositionen – zurückzugreifen, wenn der Kran diese Option bietet. Ferner schwingt das Ladegut weniger während der Kranbewegungen, da die freie Länge des Hubkabels geringer ist als her herkömmlichen Krankenhaus.
Kurzum: Ich will Krane. Doppellenker-Wippdrehkrane. Wer hat sich diesen Begriff erdacht? Muss in einer Bezeichnung wirklich jede Eigenschaft genannt werden? Egal. Es gibt t diese Krane bereits seit mehr als 80 Jahren (1930).
Da aktuell der Umbau meines Druckers ansteht, werden in den nächsten – geschätzt – 2 Wochen keine produktiven Drucke entstehen sondern Zubehörteile für den Drucker.
Die Druckzeit kann ich also in die Konstruktion der Modelle investieren.
Da ich das Rad ungern neu erfinde, habe ich das Internet nach geeigneten Modellen abgegrast. Auf https://cgtrader.com habe ich ein einfaches Bundle mit diversen Kranen für 12,-€ bezogen, aus dem ich mir Vorlagen für den Eigenbedarf erstelle.
Mein Kranmodell
Mindestens einen Kran werde ich jedoch nach dem Prinzip des Doppellenker-Wippdrehkrans erstellen und frei nach diesem Vorbildfoto eines 20t Doppellenker-Wippdrehkrans im Hafen von Rostock konstruieren. Dieser wurde noch vom VEB Kranbau Eberswalde gebaut und hat je nach Stellung des Auslegers eine
Tragkraft von bis zu 12,5t bei maximal 32m Auslegerreichweite bis hin zu einer Tragkraft von maximal 20t bei bis zu 16m Auslegerreichweite.
{kind=link}
Heute Nacht habe ich etwas Zeit und ich plane die ersten 3D-Modellierarbeiten zu diesem Projekt durchführen. Das Doppellenker-Wippsystem wird dabei den Anfang machen.
Doch bevor ich damit anfange noch ein paar Worte zum Plural von Kran. Heißt es nun Krane oder Kräne? Die korrekte Antwort ist: beides.
Geläufig und umgangssprachlich wird Kräne verwendet. In der Fachsprache wird eher Krane verwendet. Da ich nicht vom Fach bin, bitte ich zu entschuldigen, dass es mir völlig egal ist. Ich verwende einfach Krane wenn ich einen Baubericht über einen Kran schreibe und Kräne wenn ich nur so über Krane spreche. 😉
Die 3D-Druckvorlage
Der Kran hat kein konkretes Vorbild, aber er soll möglichst realistisch und wo möglich als Funktionsmodell konstruiert werden. Zumindest das drehen des Auslegers und das Heben und Senken des Hebezeugs kann ich mir vorstellen.
Das Ausfahren und Einfahren des Wipplenkers von Hand ist bereits im Modell realisiert. Auf der Unterseite der Motoratrappe befinden sich fünf Rasten um den Kranausleger in verschiedenen Positionen einhängen zu können.
Das Bauteil wird vermutlich aus Messing gefertigt, da es großen Belastungen ausgesetzt sein dürfte, zumindest wenn mein Plan fehlschlägt den Doppellenker Wippmechanismus funktionsfähig zu gestalten, was ein Füllen des Gegengewichtes mit Bleischrot beinhaltet.
Auf dem Bild unten ist der Hafenkran bereits recht gut zu erkennen. Er wird jedoch noch ein moderneres Untergestell erhalten.

Das folgende Bild zeigt das Modell mit dem neuen Unterbau.
Der obere Wipplenker hat zudem eine offene Konstruktion erhalten über deren finale Ausarbeitung ich mir noch nicht im Klaren bin. Bei der geschlossenen Kastenbauweise würde der Laufsteg zur Kranspitze seitlich am Wipplenker entlang führen. Bei der offenen Bauweise könnte ich diesen auf dem Wipplenker setzen. Allerdings wirkt die offene Bauweise etwas „altbacken“ und erinnert mehr an Gittermastkrane.
Recherche
Ein interessantes Thema. Habe mir aus der Bibliothek der Technik mal folgende Fachliteratur besorgt (keine 10 Euro online). In Englisch verfasst und mit vielen hilfreichen Informationen versehen vermittelt das Büchlein einige technische Daten, die mich die Konstruktion meines Krans haben überdenken lassen. Darüber hinaus lernt man die genaue (engl.) Bezeichnung der Kranbestandteile kennen.
In Englisch verfasst und mit vielen hilfreichen Informationen versehen vermittelt das Büchlein einige technische Daten, die mich die Konstruktion meines Krans haben überdenken lassen. Darüber hinaus lernt man die genaue (engl.) Bezeichnung der Kranbestandteile kennen.
Der geplante Kran soll nun sehr nah am Vorbild des Ardelt Tukan M1000 angelehnt sein und einige von dessen Kern-Designelementen in vereinfachter Form aufweisen. Da ich im Moment noch lese/recherchiere, stehen noch nicht alle Features fest.
Die Zahnstange, die die Auslenkung des Kranarms kontrolliert jedoch wird mindestens für das manuelle verändern von dessen Stellung genutzt werden können ohne dabei unrealistisch zu wirken.
Animation des Mobilen Hafenkrans
Hier ein YouTube Video, das den folgenden Text und meine Überlegungen illustriert. Das Modell im Video schein stationär zu sein. Bei meinen überlegungen unten kommen die gleichen Techniken zum Einsatz, außer das die gesamte Installation sich fest auf einem Schlitten montiert unter der Anlage verschieben kann.
Der Hafenkran im Maßstab 1:160 wird an sich schon eine filigrane Angelegenheit. Dennoch würde ich ihn gerne fernsteuern können. Als Schmankerl sozusagen. Im folgenden Text stelle ich dazu einige meiner Überlegungen vor.
Das Verfahren der Kranbrücke über dem Gleisanschluß des Hafens, parallel zur Kaimauer, stellt einige Anforderungen auch an die Standsicherheit des Modells. Aus diesem Grund wird der Hafenkran über vier Verankerungsdrähte (und damit vier mögliche elektrische Pole/Leitungen) durch zwei versteckte Längsnuten – neben den beiden Schienen des Krans – an einem Schlitten unter der Anlage befestigt. Dieser Schlitten kann mittels Steppermotor, Timingbelt und Parallelverschiebung positioniert werden. Damit wäre ein Teil der Mechanik bereits unter der Anlage verbaut. Zwei der Verankerungsdrähte transportieren das DCC-Signal inkl. Strom, die beiden anderen können optional oder redundant genutzt werden.
Drehen des Krans. Auch hier kommt ein (kleiner) Steppermotor mit Ritzel zum Einsatz, der wie im Vorbild die Zahnscheibe des Aufbaus antreibt. Dieser Motor findet in der Kranbrücke Platz. Der Dekoder (vermutlich ein ATtiny85 Mikrocontroller) befindet sich ebenfalls in der Kranbrücke.
Der Aufbau wird hingegen eine Herausforderung. Er muss der Steppermotor für den Ausleger und für die Winde beherbergen und zwei elektrische Leitungen erhalten die dennoch eine 360-Grad-Rotation des Aufbaus ermöglicht. Außerdem muss dort ein Dekoder für zwei Motoren/Servos Platz finden (auch hier vermutlich ein ATtiny85 Mikrocontroller, ggf. ein Arduino Nano).
Die Stromzufuhr wird mittels eines 2mm Kopfhöreranschlusses (Klinkenstecker und Buchse) realisiert. Ein reiner Kopfhöreranschluß bietet drei Pole/Leitungen, ein kombinierter (Smartphone-) Kopfhörer-Mikrophon-Anschluß sogar vier Pole/Leitungen. Eventuell ließe sich damit neben dem DCC-Signal noch Strom für eine LED Beleuchtung übertragen. Zumindest können die Kontakte des Schlittens bis in den Aufbau durchgeschleift werden. Der Klinkenstecker besitzt bekanntermaßen eine Einrastung und dürfte mechanich ausreichen, um die Lateral- und Biegekräfte des Auslegers aufzunehmen.
Der Ausleger benötigt zum Heben und Senken entweder einen Servo oder einen Steppermotor. Der Servo könnte eine Hebelmechanik oder eine Zahnstange antreiben, der Steppermotir eine Zahnstange oder eine Gewindestange. Beide Antrueb im Gehäuse des Krans so unterzubringen, dass noch ein Winde darin Platz findet, könnte eine Herausforderung sein.
Die Winde wird von einem Steppermotor angetrieben und nutzt einen stabilen aber dünnen, verdrillungsfreien Faden. Der Haken ist aus Metall und mit Bleischrot beschwert. Evtl. wird ein Massengutkübel bzw. Greifer, ein starrer Spreader oder ein Containerspreader fest damit verbunden (größere Masse).
Der Containerspreader könnte theoretisch ebenfalls animiert werden, aber das ist im ersten Step unrealistisch. Evtl kommen hier später die beiden zusätzlichen elektrischen Pole/Leitungen zum Einsatz. Es wäre auch eine Mikroelektronik mit zwei Knopfzellen (Uhrenbatterien) als Stomversorgung, einem ATtiny85 Microcontroler, einem paar IR-Sensoren für die Aktivierung und Deaktivierung eines Miniaturmotors (ggf. in jedem Container) für die Klammern des Spreaders zum Einsatz kommen um diesen autark zu steuern.
Leider müsste dazu eine eigene Platine mit SMD Bauelementen entwickelt werden, die in den winzigen Spreader passt. Auch die Container müssen Infos an den Spreader weitergeben (steht auf einer Fläche = verdunkelter IR sensor, befindet sich in der Luft = lucht auf dem IR Sensor (oder Proxy-Sensor an der Unterseite des Containers). Es könnten IR-Infos vom Kranaufbau ausgesendet werden, die der Spreader auf seiner dem Aufbau zugewandten Seite empfängt und auswertet.
Das Ganze ist ein Hirngespinst das technisch an der äußersten Grenze des machbaren anzusiedeln ist. Vermutlich eher ein H0-Projekt (Maßstab 1:87). Jedes Element das aus dem Spreader ausgekoppelt und z.B. im Container oder Kran untergebracht werden kann erleichtert die Realisierung des Projektes.